KNX Stack for Linux
A KNX Stack for Linux is the implementation of KNX system software for devices (KNX Management Server) running the Linux operation system. It encapsulates the complete KNX communication for runtime and for device configuration. An application inside the device has access to the group objects and parameters of the KNX system.
What is KNX Stack
The software is implemented as a user-space Linux application (console application, without a user interface) and acts as a communication server to the KNX system. Client applications can start the software and communicate with the KNX stack using a simple binary messaging protocol (similar to a Remote Procedure Call RPC).
The internal configuration of the KNX stack SW can be set and retrieved by the client via the API configuration interface (see below). The stack SW is typically terminated only for shut down.
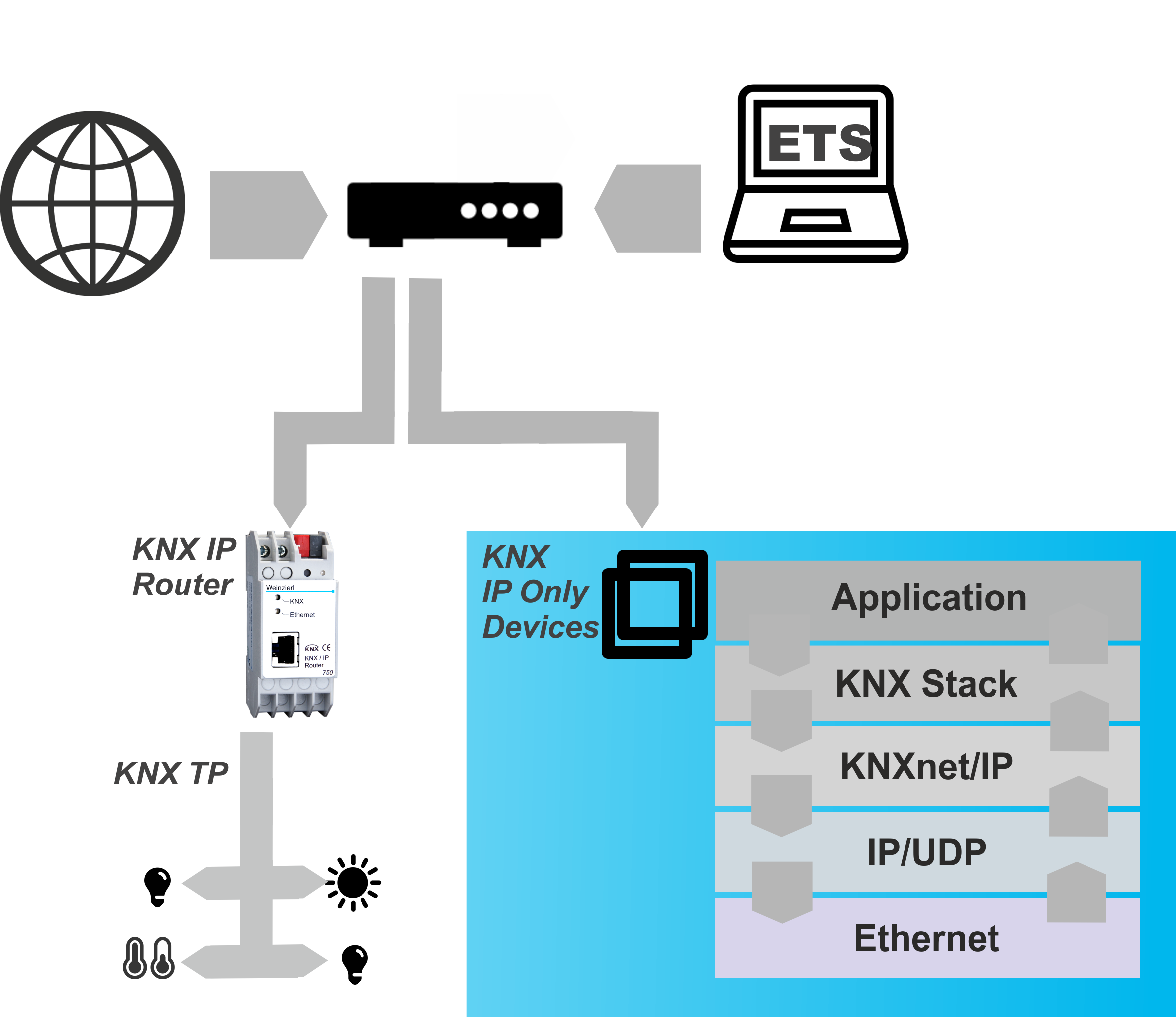
Conncetion to KNX IP

Creating a connection to the KNX network using the medium KNX IP does not require dedicated hardware. As KNX IP is based on UDP/IP the KNX Stack IP for Linux uses the IP sockets of the operating system.
Device configuration
Most KNX networks are configured in system mode (S-Mode) using the ETS tool (KNX Engineering Tool Software). The representation and handling of a Linux based device in ETS is the same as for all other KNX devices.
Each KNX device must support a programming mode controlled via a hardware button or alternatively via a virtual button on a screen. The device configuration is loaded into the device via the KNX network.